Modern Cyber-Physical Systems (CPS) are often deployed in environments that cannot be reproduced in laboratory conditions, for periods of time that largely exceed the time available for experimentation. For example, an autonomous agricultural robot is expected to work under heterogeneous terrain, under varying meteorological conditions, and in the proximity of other robots, humans, and/or wildlife. When faced with unforeseen environments, the CPS must not fail or harm its surroundings. During the development of the CPS (see Cyber-physical systems), a large body of knowledge is generated in the form of models and experimental results, that is not being put to use after the CPS is deployed.
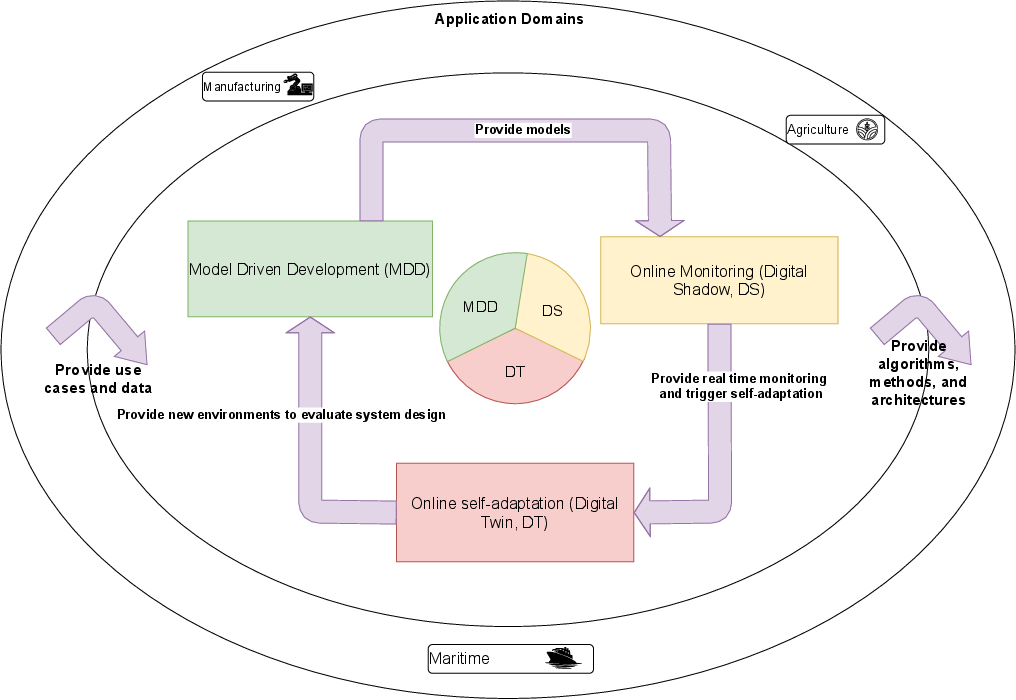
We envision that every CPS will eventually come with its own Digital Twin (DT). The DT is a virtual system that represents a CPS -- its Physical Twin (PT) -- that continuously collects data about the PT and its environment, correlates it with the models of the PT, and provides services such as anomaly detection and self-adaptation. The DT is thus crucial in mitigating the effects of unforeseen environments, and mitigating risks caused by unintended behaviors of the system stemming from inadequate design.
DTs will be open ended, that is, they will allow new services to be added by different stakeholders throughout the lifetime of the PT. DT services and their interaction will be formally verified, and thus dependable. They will be used/extended by stakeholders with conflicting interests: operators of the CPS, who are interested in, e.g., preventing down-time; and manufacturers, who are interested in learning about the CPS environment to improve subsequent products. For example, the manufacturer should not be able to infer the detailed control actions of the CPS, for that is the operator's Intellectual Property (IP). DTs will therefore accommodate different viewpoints of the PT, with IP being preserved by design. Self-adaptations will be rehearsed and formally verified by the DT before being carried out in real life. As systems of systems, DTs will be created from the composition of other DTs.
The research theme will undergo research on three fronts, with the aim at enabling the vision described above:
The following are example research topics that fit with the above mission:
| Navn | Jobtitel | Telefon | Bygning | |
|---|---|---|---|---|
| Boudjadar, Jalil | Lektor | jalil@ece.au.dk | +4593508726 | 5123, 413 |
| Esterle, Lukas | Lektor | lukas.esterle@ece.au.dk | +4522464893 | 5123, 414 |
| Frasheri, Mirgita | Tenure Track adjunkt | mirgita.frasheri@ece.au.dk | 5123, 424 | |
| Gonçalves Gomes, Cláudio Ângelo | Lektor | claudio.gomes@ece.au.dk | +4593522981 | 5123, 411 |
| Larsen, Peter Gorm | Professor | pgl@ece.au.dk | +4541893260 | 5123, 418 |
| Lemming, Jakob | Chefkonsulent | jle@ece.au.dk | +4593511580 | |
| Mikkelsen, Peter Høgh | Lektor | phm@ece.au.dk | +4541893245 | 5123, 424 |
| Schultz, Carl Peter Leslie | Lektor | cschultz@ece.au.dk | +4593508809 | 5123, 411 |
| Talasila, Prasad | AC-TAP | prasad.talasila@ece.au.dk | 5123, 321 | |
| Tola, Daniella | Undervisningsassistent | dt@ece.au.dk |
There is an urgent need for developing the profile of the "Digital Twin" Engineer. Usually, this means enriching the education of engineers coming with two different backgrounds:
Bachelor projects are ideal targets for our case studies.
As a result of the above considerations, the following courses are good venues:

